Skeletal Sleeve for Movement Awareness
Amplifying movement through mechanical feedback
- Year
- 2025
- Duration
- 8 weeks
- Tools
- 3D modelling, 3D printing, Physical prototyping
- Type
- Group Project
- Summary
- A wearable system that replaces digital tracking with embodied feedback. The sleeve amplifies subtle movements, allowing users to feel and adjust their form in real time.
Introduction
This project explores how wearable technology can function without electronics while still providing meaningful, real-time feedback. The outcome is a mechanical sleeve designed for golfers, where maintaining proper elbow form is critical. Instead of measuring performance through sensors, the sleeve engages directly with the body, translating movement into immediate physical feedback.
Problem
Most sports wearables treat the body as a passive object of measurement. They collect data, analyze it, and return feedback through screens or metrics. This positions the device as an external evaluator, creating distance between movement and perception.
This project challenges that model. Rather than passively observing the body, the goal was to actively engage it. The key insight was that feedback can be more effective when it is immediate, physical, and embodied, when the user feels their movement rather than interprets it.
Concept

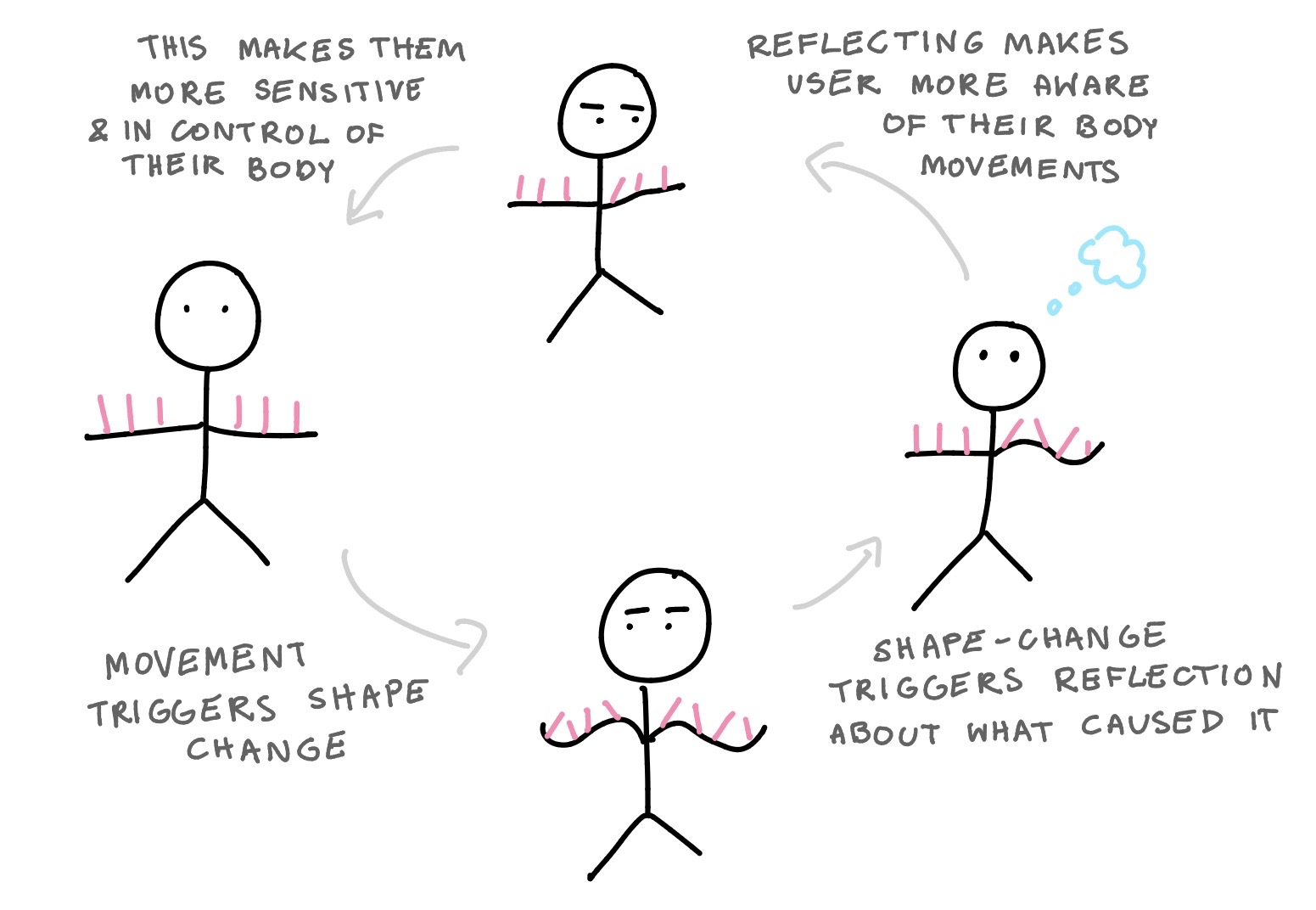
The sleeve acts as an extension of the body’s proprioceptive system. Small changes in elbow position are translated into amplified tactile and visual cues, making subtle adjustments noticeable.
As the arm moves, the structure deforms in response. This creates a continuous feedback loop where movement and sensation are directly linked. What would normally go unnoticed, like slight rotations or shifts in posture, becomes perceptible through changes in pressure and form.
Rather than correcting movement, the sleeve makes it more visible and tangible. It functions as a real-time “map” of the body in motion extending the body’s sensory capabilities
Design
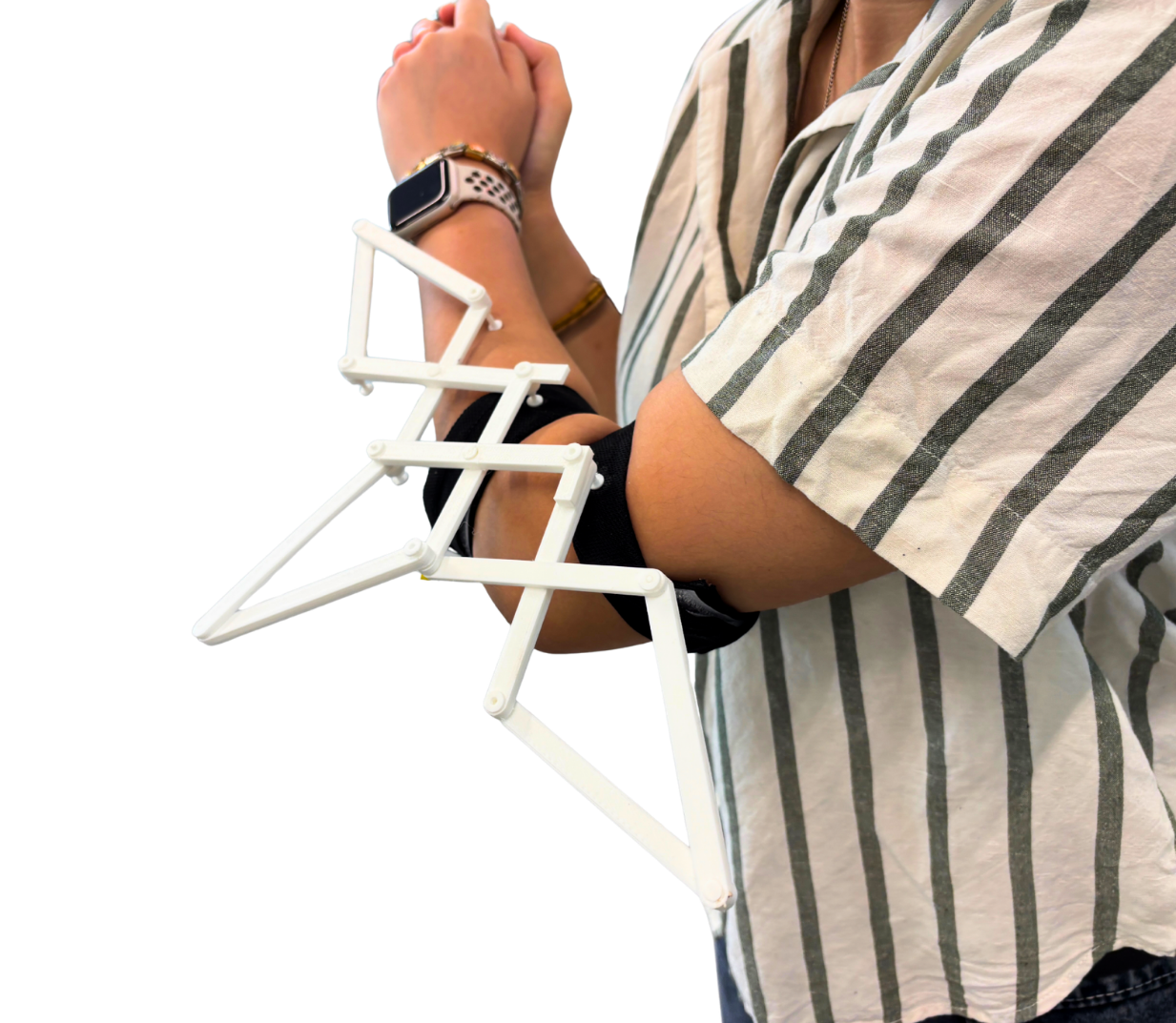
The sleeve is built around a skeletal framework that physically reacts to movement. A system of scissor-hinge mechanisms expands and contracts with the bending of the elbow, translating motion into a spike-like transformation along the arm.
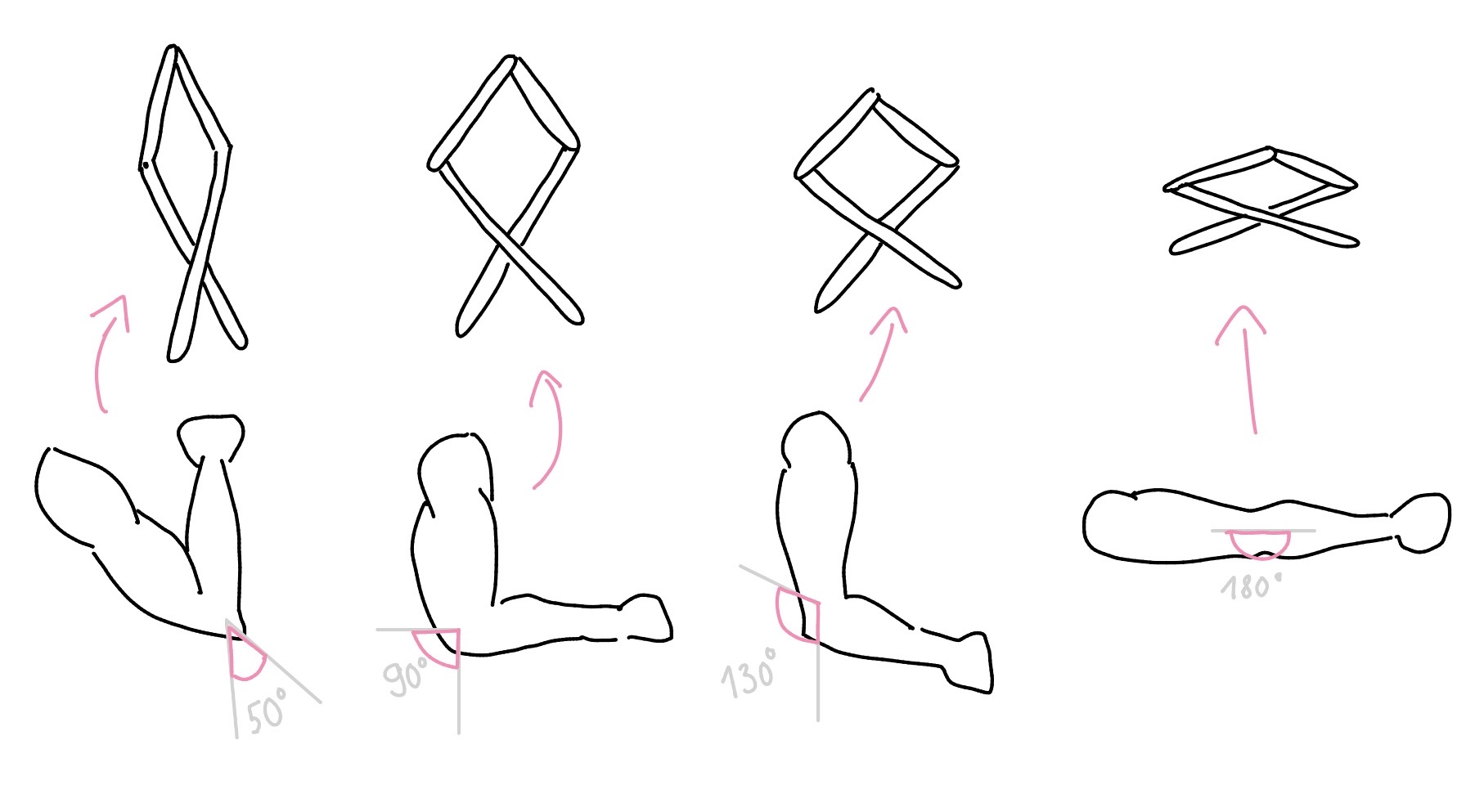
As the arm flexes, the hinges expand outward, creating both a tactile sensation and a visible change in form. The feedback is proportional to the movement: subtle when adjustments are small, more pronounced when deviations increase.
The design does not aim to constrain or correct the body. Instead, it amplifies movement, allowing the user to sense and adjust their posture independently.
Process
The project began with an exploration of materials and structures that could respond to body movement without relying on electronics. The aim was to find a physical system that could change shape directly through motion, creating feedback that is immediate and embodied rather than computed.

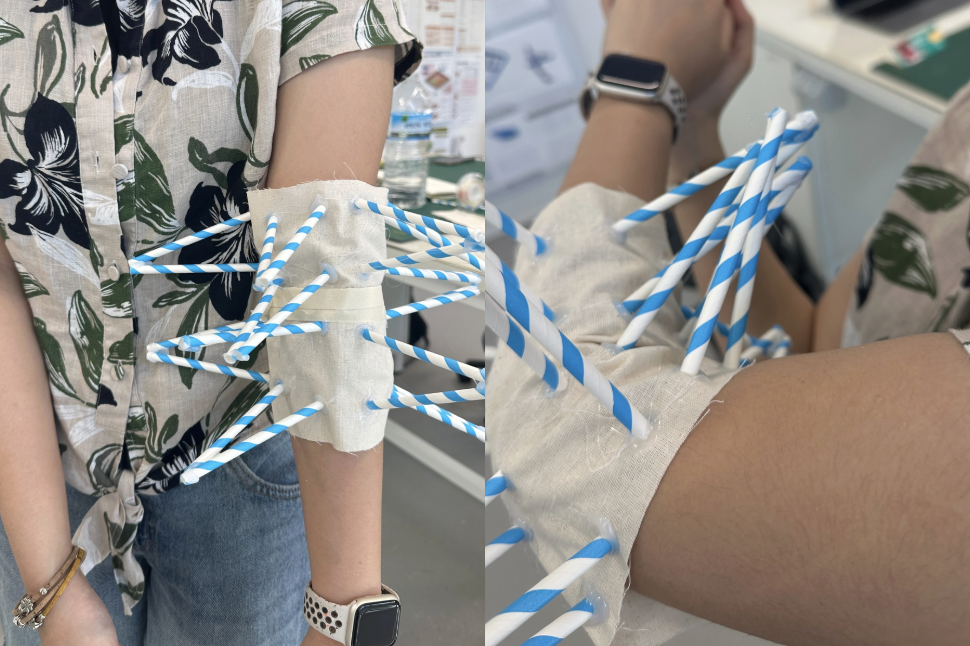
To test this idea quickly, we built an initial low-fidelity prototype using simple materials such as straws and fabric. This allowed us to observe whether movement alone could drive visible structural change. The concept worked in principle (the straws shifted and adjusted as the arm moved) but the behaviour was uncontrolled and lacked direction. The structure responded, but not in a way that clearly translated movement into readable feedback. It felt loose, with no defined mechanical logic guiding the transformation. We needed something that could still respond passively to movement, but with predictable, directional behaviour.

The next iteration introduced scissor-hinge mechanisms, which provided that missing structure. Instead of loose deformation, the system now translated motion into controlled expansion and contraction. This allowed us to test how small changes in elbow position could be amplified into clearer physical feedback.
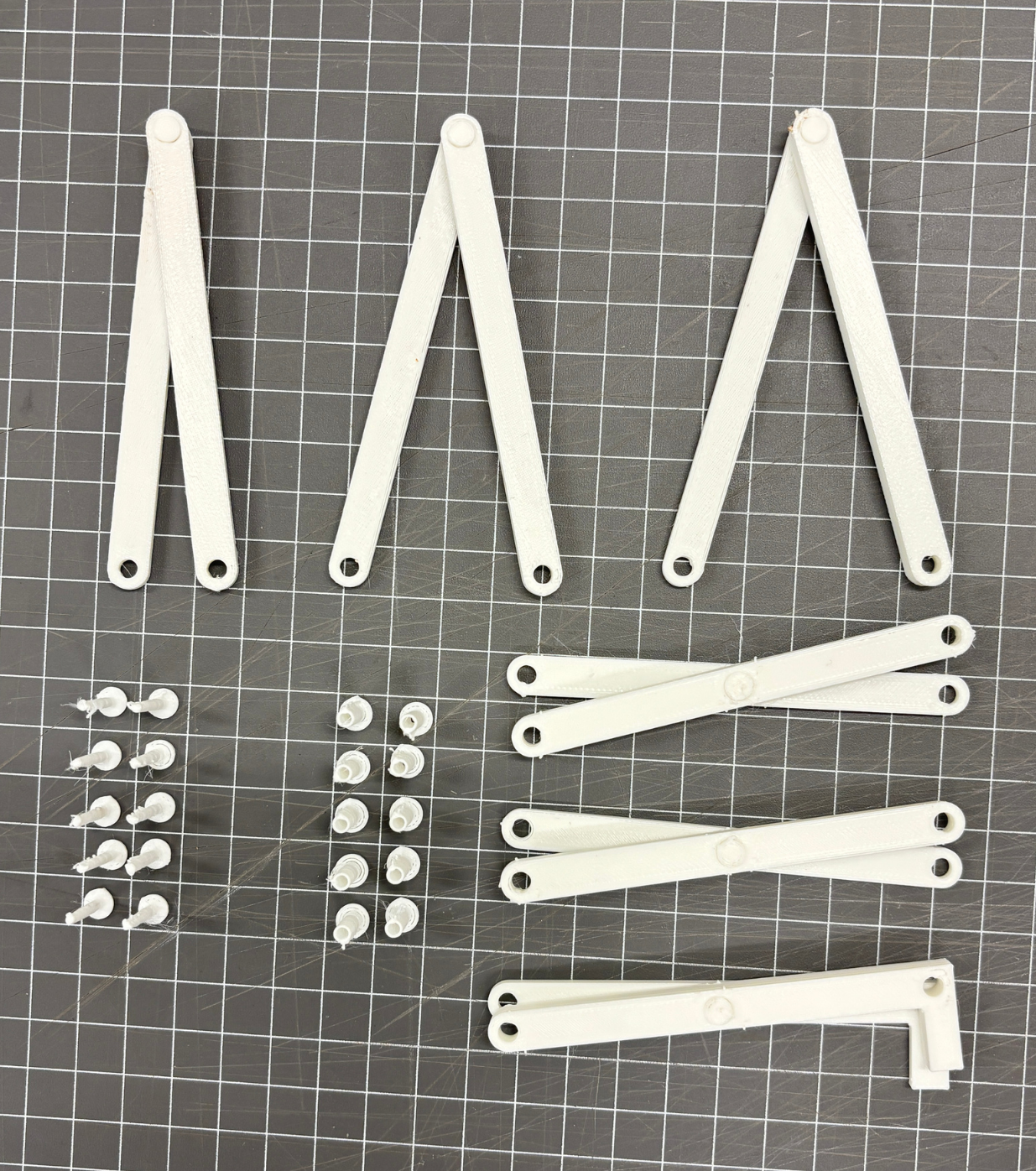
The final prototype was developed using 3D-printed PLA components mounted on adjustable fabric straps. This allowed for precision in the mechanical system while maintaining flexibility in fit. The structure responded consistently to arm movement, expanding and contracting in a way that made subtle posture changes immediately perceptible.
Outcome
The final result is a fully functional, non-electronic wearable that provides immediate tactile and visual feedback. It allows users to perceive subtle changes in their movement and adjust in real time.
The project demonstrates that wearable technology does not need computation to be effective. Mechanical systems can create direct, continuous feedback loops that feel more integrated with the body.
More broadly, it suggests an alternative approach to wearable design—one where embodied sensation and engagement is prioritized over data and evaluation.